模型介绍
模型简介
CycleGAN(Cycle Generative Adversarial Network) 即循环对抗生成网络,该模型实现了一种在没有配对示例的情况下学习将图像从源域 X 转换到目标域 Y 的方法。
该模型一个重要应用领域是域迁移,它只需要两种域的数据,而不需要他们有严格对应关系,是一种新的无监督的图像迁移网络。
模型结构
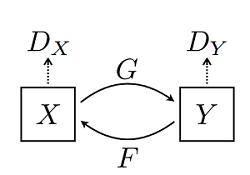
CycleGAN 网络本质上是由两个镜像对称的 GAN 网络组成,其结构如下图所示:
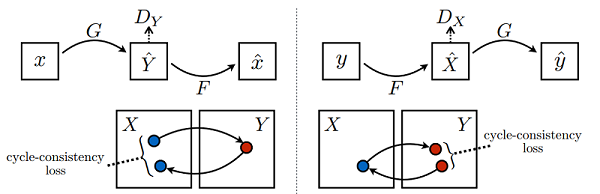
该模型一个很重要的部分就是损失函数,在所有损失里面循环一致损失(Cycle Consistency Loss)是最重要的。循环损失的计算过程如下图所示:
数据集
使用ImageNet数据集,选取苹果和橘子部分。
数据集下载
from download import download
url = "https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/notebook/models/application/CycleGAN_apple2orange.zip"
download(url, ".", kind="zip", replace=True)数据集加载
from mindspore.dataset import MindDataset
# 读取MindRecord格式数据
name_mr = "./CycleGAN_apple2orange/apple2orange_train.mindrecord"
data = MindDataset(dataset_files=name_mr)
print("Datasize: ", data.get_dataset_size())
batch_size = 1
dataset = data.batch(batch_size)
datasize = dataset.get_dataset_size()构建生成器
采用ResNet模型结构,对于128×128大小的输入图片采用6个残差块相连,图片大小为256×256以上的需要采用9个残差块相连,所以本文网络有9个残差块相连。
生成器结构如下:

模型结构代码实现:
import mindspore.nn as nn
import mindspore.ops as ops
from mindspore.common.initializer import Normal
weight_init = Normal(sigma=0.02)
class ConvNormReLU(nn.Cell):
def __init__(self, input_channel, out_planes, kernel_size=4, stride=2, alpha=0.2, norm_mode='instance',
pad_mode='CONSTANT', use_relu=True, padding=None, transpose=False):
super(ConvNormReLU, self).__init__()
norm = nn.BatchNorm2d(out_planes)
if norm_mode == 'instance':
norm = nn.BatchNorm2d(out_planes, affine=False)
has_bias = (norm_mode == 'instance')
if padding is None:
padding = (kernel_size - 1) // 2
if pad_mode == 'CONSTANT':
if transpose:
conv = nn.Conv2dTranspose(input_channel, out_planes, kernel_size, stride, pad_mode='same',
has_bias=has_bias, weight_init=weight_init)
else:
conv = nn.Conv2d(input_channel, out_planes, kernel_size, stride, pad_mode='pad',
has_bias=has_bias, padding=padding, weight_init=weight_init)
layers = [conv, norm]
else:
paddings = ((0, 0), (0, 0), (padding, padding), (padding, padding))
pad = nn.Pad(paddings=paddings, mode=pad_mode)
if transpose:
conv = nn.Conv2dTranspose(input_channel, out_planes, kernel_size, stride, pad_mode='pad',
has_bias=has_bias, weight_init=weight_init)
else:
conv = nn.Conv2d(input_channel, out_planes, kernel_size, stride, pad_mode='pad',
has_bias=has_bias, weight_init=weight_init)
layers = [pad, conv, norm]
if use_relu:
relu = nn.ReLU()
if alpha > 0:
relu = nn.LeakyReLU(alpha)
layers.append(relu)
self.features = nn.SequentialCell(layers)
def construct(self, x):
output = self.features(x)
return output
class ResidualBlock(nn.Cell):
def __init__(self, dim, norm_mode='instance', dropout=False, pad_mode="CONSTANT"):
super(ResidualBlock, self).__init__()
self.conv1 = ConvNormReLU(dim, dim, 3, 1, 0, norm_mode, pad_mode)
self.conv2 = ConvNormReLU(dim, dim, 3, 1, 0, norm_mode, pad_mode, use_relu=False)
self.dropout = dropout
if dropout:
self.dropout = nn.Dropout(p=0.5)
def construct(self, x):
out = self.conv1(x)
if self.dropout:
out = self.dropout(out)
out = self.conv2(out)
return x + out
class ResNetGenerator(nn.Cell):
def __init__(self, input_channel=3, output_channel=64, n_layers=9, alpha=0.2, norm_mode='instance', dropout=False,
pad_mode="CONSTANT"):
super(ResNetGenerator, self).__init__()
self.conv_in = ConvNormReLU(input_channel, output_channel, 7, 1, alpha, norm_mode, pad_mode=pad_mode)
self.down_1 = ConvNormReLU(output_channel, output_channel * 2, 3, 2, alpha, norm_mode)
self.down_2 = ConvNormReLU(output_channel * 2, output_channel * 4, 3, 2, alpha, norm_mode)
layers = [ResidualBlock(output_channel * 4, norm_mode, dropout=dropout, pad_mode=pad_mode)] * n_layers
self.residuals = nn.SequentialCell(layers)
self.up_2 = ConvNormReLU(output_channel * 4, output_channel * 2, 3, 2, alpha, norm_mode, transpose=True)
self.up_1 = ConvNormReLU(output_channel * 2, output_channel, 3, 2, alpha, norm_mode, transpose=True)
if pad_mode == "CONSTANT":
self.conv_out = nn.Conv2d(output_channel, 3, kernel_size=7, stride=1, pad_mode='pad',
padding=3, weight_init=weight_init)
else:
pad = nn.Pad(paddings=((0, 0), (0, 0), (3, 3), (3, 3)), mode=pad_mode)
conv = nn.Conv2d(output_channel, 3, kernel_size=7, stride=1, pad_mode='pad', weight_init=weight_init)
self.conv_out = nn.SequentialCell([pad, conv])
def construct(self, x):
x = self.conv_in(x)
x = self.down_1(x)
x = self.down_2(x)
x = self.residuals(x)
x = self.up_2(x)
x = self.up_1(x)
output = self.conv_out(x)
return ops.tanh(output)
# 实例化生成器
net_rg_a = ResNetGenerator()
net_rg_a.update_parameters_name('net_rg_a.')
net_rg_b = ResNetGenerator()
net_rg_b.update_parameters_name('net_rg_b.')
构建判别器
判别器其实是一个二分类网络模型,输出判定该图像为真实图的概率。代码实现如下:
# 定义判别器
class Discriminator(nn.Cell):
def __init__(self, input_channel=3, output_channel=64, n_layers=3, alpha=0.2, norm_mode='instance'):
super(Discriminator, self).__init__()
kernel_size = 4
layers = [nn.Conv2d(input_channel, output_channel, kernel_size, 2, pad_mode='pad', padding=1, weight_init=weight_init),
nn.LeakyReLU(alpha)]
nf_mult = output_channel
for i in range(1, n_layers):
nf_mult_prev = nf_mult
nf_mult = min(2 ** i, 8) * output_channel
layers.append(ConvNormReLU(nf_mult_prev, nf_mult, kernel_size, 2, alpha, norm_mode, padding=1))
nf_mult_prev = nf_mult
nf_mult = min(2 ** n_layers, 8) * output_channel
layers.append(ConvNormReLU(nf_mult_prev, nf_mult, kernel_size, 1, alpha, norm_mode, padding=1))
layers.append(nn.Conv2d(nf_mult, 1, kernel_size, 1, pad_mode='pad', padding=1, weight_init=weight_init))
self.features = nn.SequentialCell(layers)
def construct(self, x):
output = self.features(x)
return output
# 判别器初始化
net_d_a = Discriminator()
net_d_a.update_parameters_name('net_d_a.')
net_d_b = Discriminator()
net_d_b.update_parameters_name('net_d_b.')
优化器和损失函数
对于生成器G及其判别器DY,目标损失函数为:
生成器的目标是最小化这个损失函数以此来对抗判别器,即:
单独的对抗损失不能保证所学函数可以将单个输入映射到期望的输出,为了进一步减少可能的映射函数的空间,学习到的映射函数应该是周期一致的,即:
对于Y,类似的:
循环一致损失函数定义如下:
循环一致损失能够保证重建图像F(G(x))与输入图像x紧密匹配。
代码实现:
# 构建生成器,判别器优化器
optimizer_rg_a = nn.Adam(net_rg_a.trainable_params(), learning_rate=0.0002, beta1=0.5)
optimizer_rg_b = nn.Adam(net_rg_b.trainable_params(), learning_rate=0.0002, beta1=0.5)
optimizer_d_a = nn.Adam(net_d_a.trainable_params(), learning_rate=0.0002, beta1=0.5)
optimizer_d_b = nn.Adam(net_d_b.trainable_params(), learning_rate=0.0002, beta1=0.5)
# GAN网络损失函数,这里最后一层不使用sigmoid函数
loss_fn = nn.MSELoss(reduction='mean')
l1_loss = nn.L1Loss("mean")
def gan_loss(predict, target):
target = ops.ones_like(predict) * target
loss = loss_fn(predict, target)
return loss前向计算
为了减小模型振荡,遵循Shrivastava等人的策略,使用生成器生成图像的历史数据而不是生成器生成的最新图像数据来更新鉴别器。
代码实现:
import mindspore as ms
# 前向计算
def generator(img_a, img_b):
fake_a = net_rg_b(img_b)
fake_b = net_rg_a(img_a)
rec_a = net_rg_b(fake_b)
rec_b = net_rg_a(fake_a)
identity_a = net_rg_b(img_a)
identity_b = net_rg_a(img_b)
return fake_a, fake_b, rec_a, rec_b, identity_a, identity_b
lambda_a = 10.0
lambda_b = 10.0
lambda_idt = 0.5
def generator_forward(img_a, img_b):
true = Tensor(True, dtype.bool_)
fake_a, fake_b, rec_a, rec_b, identity_a, identity_b = generator(img_a, img_b)
loss_g_a = gan_loss(net_d_b(fake_b), true)
loss_g_b = gan_loss(net_d_a(fake_a), true)
loss_c_a = l1_loss(rec_a, img_a) * lambda_a
loss_c_b = l1_loss(rec_b, img_b) * lambda_b
loss_idt_a = l1_loss(identity_a, img_a) * lambda_a * lambda_idt
loss_idt_b = l1_loss(identity_b, img_b) * lambda_b * lambda_idt
loss_g = loss_g_a + loss_g_b + loss_c_a + loss_c_b + loss_idt_a + loss_idt_b
return fake_a, fake_b, loss_g, loss_g_a, loss_g_b, loss_c_a, loss_c_b, loss_idt_a, loss_idt_b
def generator_forward_grad(img_a, img_b):
_, _, loss_g, _, _, _, _, _, _ = generator_forward(img_a, img_b)
return loss_g
def discriminator_forward(img_a, img_b, fake_a, fake_b):
false = Tensor(False, dtype.bool_)
true = Tensor(True, dtype.bool_)
d_fake_a = net_d_a(fake_a)
d_img_a = net_d_a(img_a)
d_fake_b = net_d_b(fake_b)
d_img_b = net_d_b(img_b)
loss_d_a = gan_loss(d_fake_a, false) + gan_loss(d_img_a, true)
loss_d_b = gan_loss(d_fake_b, false) + gan_loss(d_img_b, true)
loss_d = (loss_d_a + loss_d_b) * 0.5
return loss_d
def discriminator_forward_a(img_a, fake_a):
false = Tensor(False, dtype.bool_)
true = Tensor(True, dtype.bool_)
d_fake_a = net_d_a(fake_a)
d_img_a = net_d_a(img_a)
loss_d_a = gan_loss(d_fake_a, false) + gan_loss(d_img_a, true)
return loss_d_a
def discriminator_forward_b(img_b, fake_b):
false = Tensor(False, dtype.bool_)
true = Tensor(True, dtype.bool_)
d_fake_b = net_d_b(fake_b)
d_img_b = net_d_b(img_b)
loss_d_b = gan_loss(d_fake_b, false) + gan_loss(d_img_b, true)
return loss_d_b
# 保留了一个图像缓冲区,用来存储之前创建的50个图像
pool_size = 50
def image_pool(images):
num_imgs = 0
image1 = []
if isinstance(images, Tensor):
images = images.asnumpy()
return_images = []
for image in images:
if num_imgs < pool_size:
num_imgs = num_imgs + 1
image1.append(image)
return_images.append(image)
else:
if random.uniform(0, 1) > 0.5:
random_id = random.randint(0, pool_size - 1)
tmp = image1[random_id].copy()
image1[random_id] = image
return_images.append(tmp)
else:
return_images.append(image)
output = Tensor(return_images, ms.float32)
if output.ndim != 4:
raise ValueError("img should be 4d, but get shape {}".format(output.shape))
return output
计算梯度和反向传播
from mindspore import value_and_grad
# 实例化求梯度的方法
grad_g_a = value_and_grad(generator_forward_grad, None, net_rg_a.trainable_params())
grad_g_b = value_and_grad(generator_forward_grad, None, net_rg_b.trainable_params())
grad_d_a = value_and_grad(discriminator_forward_a, None, net_d_a.trainable_params())
grad_d_b = value_and_grad(discriminator_forward_b, None, net_d_b.trainable_params())
# 计算生成器的梯度,反向传播更新参数
def train_step_g(img_a, img_b):
net_d_a.set_grad(False)
net_d_b.set_grad(False)
fake_a, fake_b, lg, lga, lgb, lca, lcb, lia, lib = generator_forward(img_a, img_b)
_, grads_g_a = grad_g_a(img_a, img_b)
_, grads_g_b = grad_g_b(img_a, img_b)
optimizer_rg_a(grads_g_a)
optimizer_rg_b(grads_g_b)
return fake_a, fake_b, lg, lga, lgb, lca, lcb, lia, lib
# 计算判别器的梯度,反向传播更新参数
def train_step_d(img_a, img_b, fake_a, fake_b):
net_d_a.set_grad(True)
net_d_b.set_grad(True)
loss_d_a, grads_d_a = grad_d_a(img_a, fake_a)
loss_d_b, grads_d_b = grad_d_b(img_b, fake_b)
loss_d = (loss_d_a + loss_d_b) * 0.5
optimizer_d_a(grads_d_a)
optimizer_d_b(grads_d_b)
return loss_d模型训练
训练分为两个主要部分:训练判别器和训练生成器,在前文的判别器损失函数中,论文采用了最小二乘损失代替负对数似然目标。
训练判别器:训练判别器的目的是最大程度地提高判别图像真伪的概率。最小化
训练生成器:最小化
训练过程代码如下:
import os
import time
import random
import numpy as np
from PIL import Image
from mindspore import Tensor, save_checkpoint
from mindspore import dtype
# 由于时间原因,epochs设置为1,可根据需求进行调整
epochs = 1
save_step_num = 80
save_checkpoint_epochs = 1
save_ckpt_dir = './train_ckpt_outputs/'
print('Start training!')
for epoch in range(epochs):
g_loss = []
d_loss = []
start_time_e = time.time()
for step, data in enumerate(dataset.create_dict_iterator()):
start_time_s = time.time()
img_a = data["image_A"]
img_b = data["image_B"]
res_g = train_step_g(img_a, img_b)
fake_a = res_g[0]
fake_b = res_g[1]
res_d = train_step_d(img_a, img_b, image_pool(fake_a), image_pool(fake_b))
loss_d = float(res_d.asnumpy())
step_time = time.time() - start_time_s
res = []
for item in res_g[2:]:
res.append(float(item.asnumpy()))
g_loss.append(res[0])
d_loss.append(loss_d)
if step % save_step_num == 0:
print(f"Epoch:[{int(epoch + 1):>3d}/{int(epochs):>3d}], "
f"step:[{int(step):>4d}/{int(datasize):>4d}], "
f"time:{step_time:>3f}s,\n"
f"loss_g:{res[0]:.2f}, loss_d:{loss_d:.2f}, "
f"loss_g_a: {res[1]:.2f}, loss_g_b: {res[2]:.2f}, "
f"loss_c_a: {res[3]:.2f}, loss_c_b: {res[4]:.2f}, "
f"loss_idt_a: {res[5]:.2f}, loss_idt_b: {res[6]:.2f}")
epoch_cost = time.time() - start_time_e
per_step_time = epoch_cost / datasize
mean_loss_d, mean_loss_g = sum(d_loss) / datasize, sum(g_loss) / datasize
print(f"Epoch:[{int(epoch + 1):>3d}/{int(epochs):>3d}], "
f"epoch time:{epoch_cost:.2f}s, per step time:{per_step_time:.2f}, "
f"mean_g_loss:{mean_loss_g:.2f}, mean_d_loss:{mean_loss_d :.2f}")
if epoch % save_checkpoint_epochs == 0:
os.makedirs(save_ckpt_dir, exist_ok=True)
save_checkpoint(net_rg_a, os.path.join(save_ckpt_dir, f"g_a_{epoch}.ckpt"))
save_checkpoint(net_rg_b, os.path.join(save_ckpt_dir, f"g_b_{epoch}.ckpt"))
save_checkpoint(net_d_a, os.path.join(save_ckpt_dir, f"d_a_{epoch}.ckpt"))
save_checkpoint(net_d_b, os.path.join(save_ckpt_dir, f"d_b_{epoch}.ckpt"))
print('End of training!')模型推理
第一行为原图,第二行为对应生成的结果图。
%%time
import os
from PIL import Image
import mindspore.dataset as ds
import mindspore.dataset.vision as vision
from mindspore import load_checkpoint, load_param_into_net
# 加载权重文件
def load_ckpt(net, ckpt_dir):
param_GA = load_checkpoint(ckpt_dir)
load_param_into_net(net, param_GA)
g_a_ckpt = './CycleGAN_apple2orange/ckpt/g_a.ckpt'
g_b_ckpt = './CycleGAN_apple2orange/ckpt/g_b.ckpt'
load_ckpt(net_rg_a, g_a_ckpt)
load_ckpt(net_rg_b, g_b_ckpt)
# 图片推理
fig = plt.figure(figsize=(11, 2.5), dpi=100)
def eval_data(dir_path, net, a):
def read_img():
for dir in os.listdir(dir_path):
path = os.path.join(dir_path, dir)
img = Image.open(path).convert('RGB')
yield img, dir
dataset = ds.GeneratorDataset(read_img, column_names=["image", "image_name"])
trans = [vision.Resize((256, 256)), vision.Normalize(mean=[0.5 * 255] * 3, std=[0.5 * 255] * 3), vision.HWC2CHW()]
dataset = dataset.map(operations=trans, input_columns=["image"])
dataset = dataset.batch(1)
for i, data in enumerate(dataset.create_dict_iterator()):
img = data["image"]
fake = net(img)
fake = (fake[0] * 0.5 * 255 + 0.5 * 255).astype(np.uint8).transpose((1, 2, 0))
img = (img[0] * 0.5 * 255 + 0.5 * 255).astype(np.uint8).transpose((1, 2, 0))
fig.add_subplot(2, 8, i+1+a)
plt.axis("off")
plt.imshow(img.asnumpy())
fig.add_subplot(2, 8, i+9+a)
plt.axis("off")
plt.imshow(fake.asnumpy())
eval_data('./CycleGAN_apple2orange/predict/apple', net_rg_a, 0)
eval_data('./CycleGAN_apple2orange/predict/orange', net_rg_b, 4)
plt.show()
总结
CycleGAN实现了一种在没有配对示例的情况下学习将图像从源域 X 转换到目标域 Y 的方法,它只需要两种域的数据,而不需要他们有严格对应关系,是一种新的无监督的图像迁移网络。







![[22] Opencv_CUDA应用之 使用背景相减法进行对象跟踪](https://img-blog.csdnimg.cn/direct/6c04e42238c6444caf31cc0863623fbb.png)